Columbus Park, flanked by Borough Hall, Kings County Superior Court, and the Cadman Plaza US Post Office (the building in the background of the photo above), has been invaded by a hip giant metal robot sculpture. It’s Rappin’ Max Robot with a foot propped up on his larger-than-life boombox. The character first appeared in Eric Orr’s Rappin’ Max Robot comic book. It was built by Welder Underground, which according to the dedication plaque is “a Brooklyn-based nonprofit that teaches young adults to become certified welders and metal fabricators by partnering with established artists to build large-scale public artworks.” Coming full circle, Eric Orr, Jr. was one of the Welder Underground apprentices who worked on the project. I was happy to see this unexpected addition to the park around the corner from City Tech. In fact, I would like to see more hip hop robots. Let’s get the giant robot hero from The Beastie Boys’ “Intergalactic” music video put up near Adam Yauch Park (RIP M.C.A.).
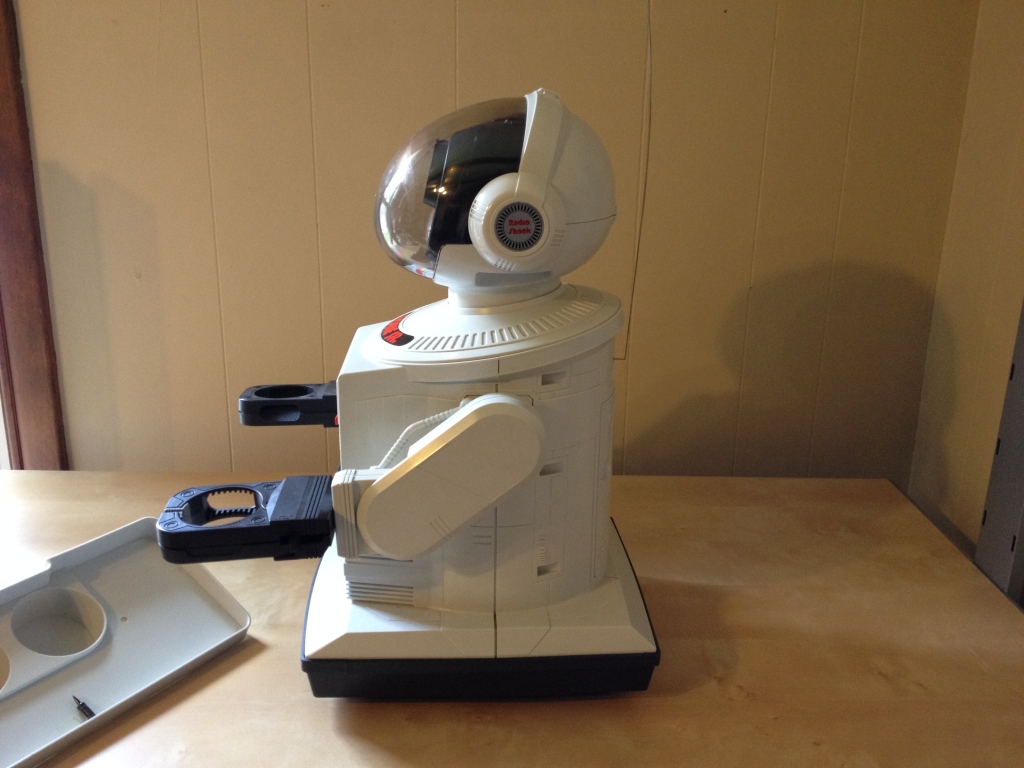
It is a less advanced version of Tomy’s Hearoid and OOM models. Robie Sr. can be remote controlled by a handheld transmitter that doubles as a walkie-talkie so that you can speak through Robie Sr.’s built-in speaker. Also, movements can be recorded to a cassette tape that can be played back to repeat the movements on command or by an internal alarm clock. He can grip items in his left hand, and he includes a tray supported by both hands for carrying larger or awkward items. You can read more details about Robie Sr.’s functions and features in the owner’s manual available at TheOldRobots.com here.
When I was a kid, I wanted one of these robots badly! I imagined it was like having R2-D2 as a friendly companion. Omnibot 2000 was the most advanced consumer robot that I was aware of at that time. Robie Sr. was a close second to my childhood imagination. The Heathkit Hero was the most astromech-like robot on the market at the time, but it was lightyears beyond my affordability and technical skill.
I remember playing for hours with a friend’s Armatron–imagining being the robot brain controlling the rattling rumble of gears moving the waldo arm according to my joystick maneuvers.
Patience and saved searches on eBay eventually led me to find this Robie Sr. to experience what this little robot was capable of. I brought him to my classes and had him in my office at school. Some students thought Robie Sr. was cool, but he didn’t seem to fire their imagination like he did me years before.
My Robie Sr. now belongs to someone else. When we were downsizing before moving to Brooklyn, I had to let go of him and put him up on eBay. Hopefully, he is continuing to live his best robot life with his new family.
Robie Sr. comes with a tray that can be held by both hands.
Left view with arm rotated to the height needed to hold a tray.
Right view with arm rotated to the height needed to hold a tray.
Bottom view of Robie Sr. Its wheels are for locomotion and tank-like steering. The black front wheel (at the top of photo) provides support and rotates based on the motion of the grey wheels.
Robie Sr. is pictured here with his tray, AC battery charger, remote control, and owner’s manual.
This screw is used for adjusting the steering alignment.
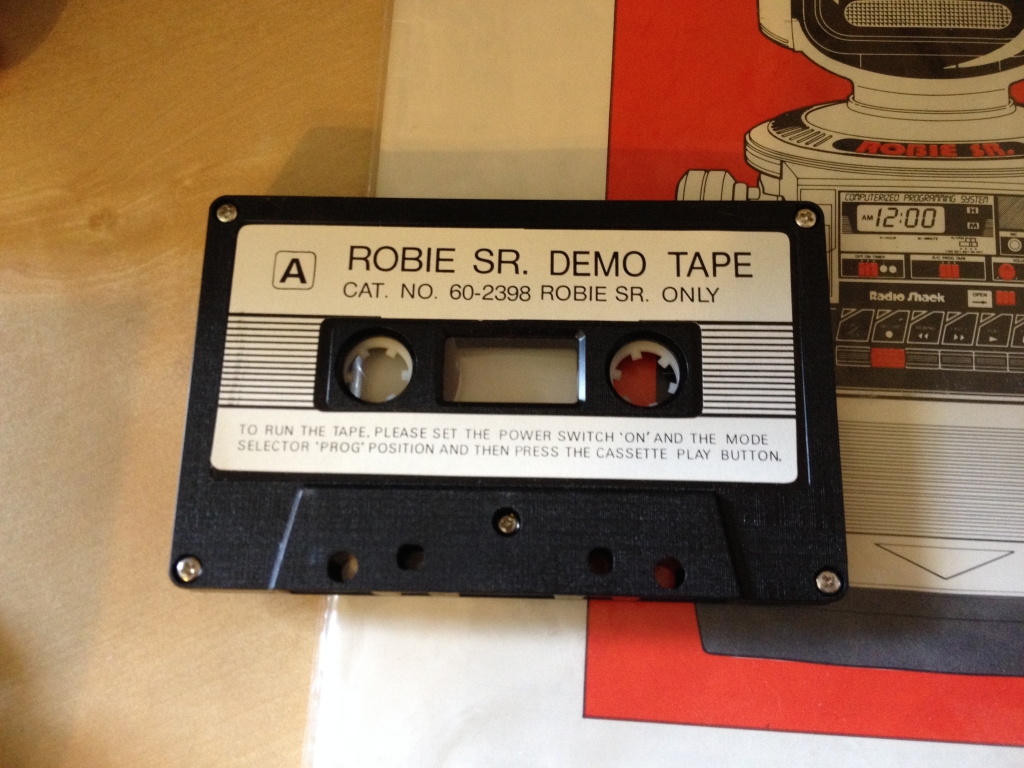
The Robie Sr. Demo Tape has a preprogrammed set of instructions for the robot to perform. To use it, you slide the cassette Open lever on the cassette tape deck on Robie Sr.’s torso, this slides the cassette tape mechanism out, place the cassette inside, push the deck back into Robie Sr.’s torso, and then push the Play button.
To recharge Robie Sr.’s big ass battery, the robot needs to be plugged into the included AC charging adapter.
For comparison, Robie Sr. is taller than an Apple Power Macintosh 8500/120. Also, the robot is about 9 years older than this Power Mac model.
Finally, here is Robie Sr. in action! Y and I made this video to show at a friend’s overseas wedding that we were unable to attend. The audio is in Mandarin for the most part. The story is that Robie Sr. needs to deliver a special message. Our dearly departed cat Miao Miao takes the message from Robie and gives it to us, and we read the message to our friends.
When I was an undergraduate at Georgia Tech, I went to two presentations made by Honda and its semi-autonomous robot Asimo in 2004.
If you’ve been reading my blog, you know that I am interested in robots. I own a Robie Sr. and I enjoy building simple robots with Lego. At the time when I made this video, I was gobsmacked by Asimo’s capabilities. I thought to myself that it seemed far more social and practical than R2-D2.
The video below is from the second presentation that I attended. I sat in the front row with my friend’s Sony camcorder to capture the action taking place on stage in the Ferst Center for the Arts where the presentations took place. Later, I edited the video and burned a DVD of it with my PowerMac G5. Today, I ripped the DVD with HandBrake and uploaded it to YouTube as an MP4 video file. Now, the video exists online:
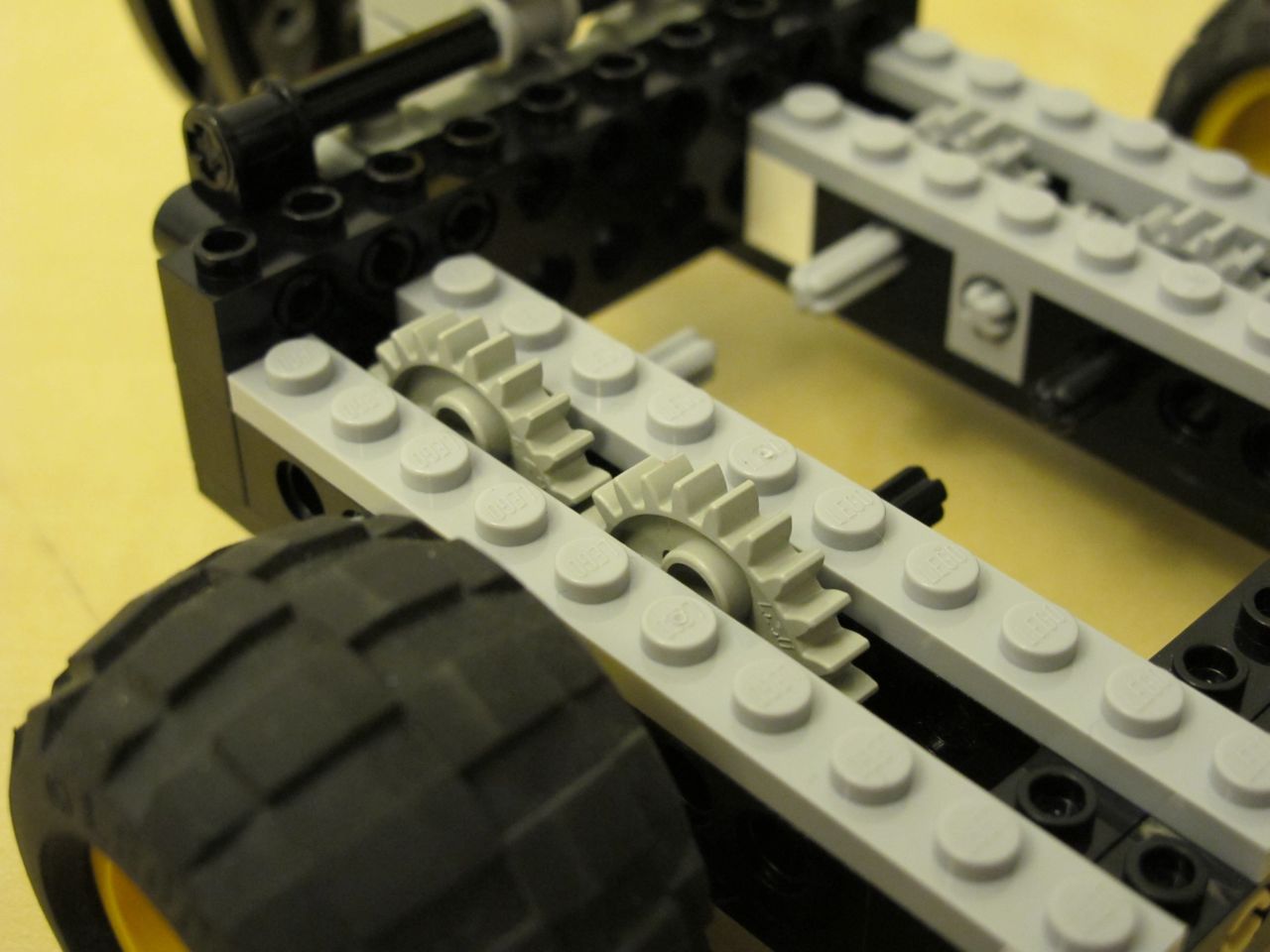
As you can see in the picture above, I finally received my assortment of gears and rods from ebay seller specialty_bricks. Through no fault of his own, it looked like I wasn’t going to receive my gears at all. The seller shipped the gears in a nice polybag envelope with First Class Parcel and Delivery Confirmation with the USPS. Unfortunately, they were confirmed as delivered last Friday, but apparently at someone else’s house. The person who received my package was kind enough to cut through the poly bag to see what was inside before taping it back up and giving back to the postal carrier for delivery at my house. I wish that I knew the kind soul who thought it was okay to open a package addressed to a different address than his or her own, and I think it’s ironic that Delivery Confirmation, which is meant to ensure delivery at the correct address, actually put me in a worse situation as a claimant for lost mail, because as far as the postal service was concerned when I called the local office was that their computer system showed that it was delivered and the postal carrier claimed to have delivered it at the right house. I have had many adventures with lost, misdelivered, and stolen packages, but I don’t think I have ever been in a catch-22 like this one.
In any event, the gears are now safely here, and the one that I needed the most is this one below–a differential gear. Using two of these, I will be able to use two motors to drive and steer the robot with only two wheels.
I probably won’t have the time to work on Fred again until after SFRA. I will post updates as they are available, and if you live around Kent, you’re welcome to stop by and play with Fred soon.
I have been interested in Lego’s Mindstorms robotics systems: RCX, NXT, and NXT 2.0, but I have been wary of investing the $200-300 in the base system without knowing if I could build a robot that would be interesting to me. Brick sorters, Rubix cube solvers, printers, etc. are interesting, but I would like to create a more intelligent version of Tomy’s Omnibot line or Heathkit’s HERO. I imagine having a robot that can navigate a space, learn it, and interact in meaningful ways with that environment. Perhaps I am thinking of the Roomba without the vacuum and brushes and with more pizzazz.
Robotics is a series of interconnected systems that operate together to fulfill programmed functions and behaviors. To build a robot, you have to design the robot’s body and mechanical functions. How will it move? What kind of drive system (for those that move) will it employ? Next, you have to consider how will the robot learn from its environment? What kind of sensors will it use? How many sensors are needed to effectively navigate a space? What sensors will provide the robot special functions? Finally, you have to program the robot to control its body in response to sensor stimuli and execute other operations with arbitrary timings or responsive subroutines. What do you want the robot to do in a given circumstance? Is there a way to give the robot a series of choices in a given circumstance? How can it be made to decide what to do with a series of choices? Etc. In short, building robots that do more than very specialized functions can be an overwhelmingly complex endeavor.
With any elaborate problem, I like to break things down into its constituent parts and learn by doing. As such, my first project is to build a remotely controlled robot platform so that I can learn design principles with Lego Technic bricks. More importantly, I need to learn how to use gears and motors to do work efficiently and reliably.
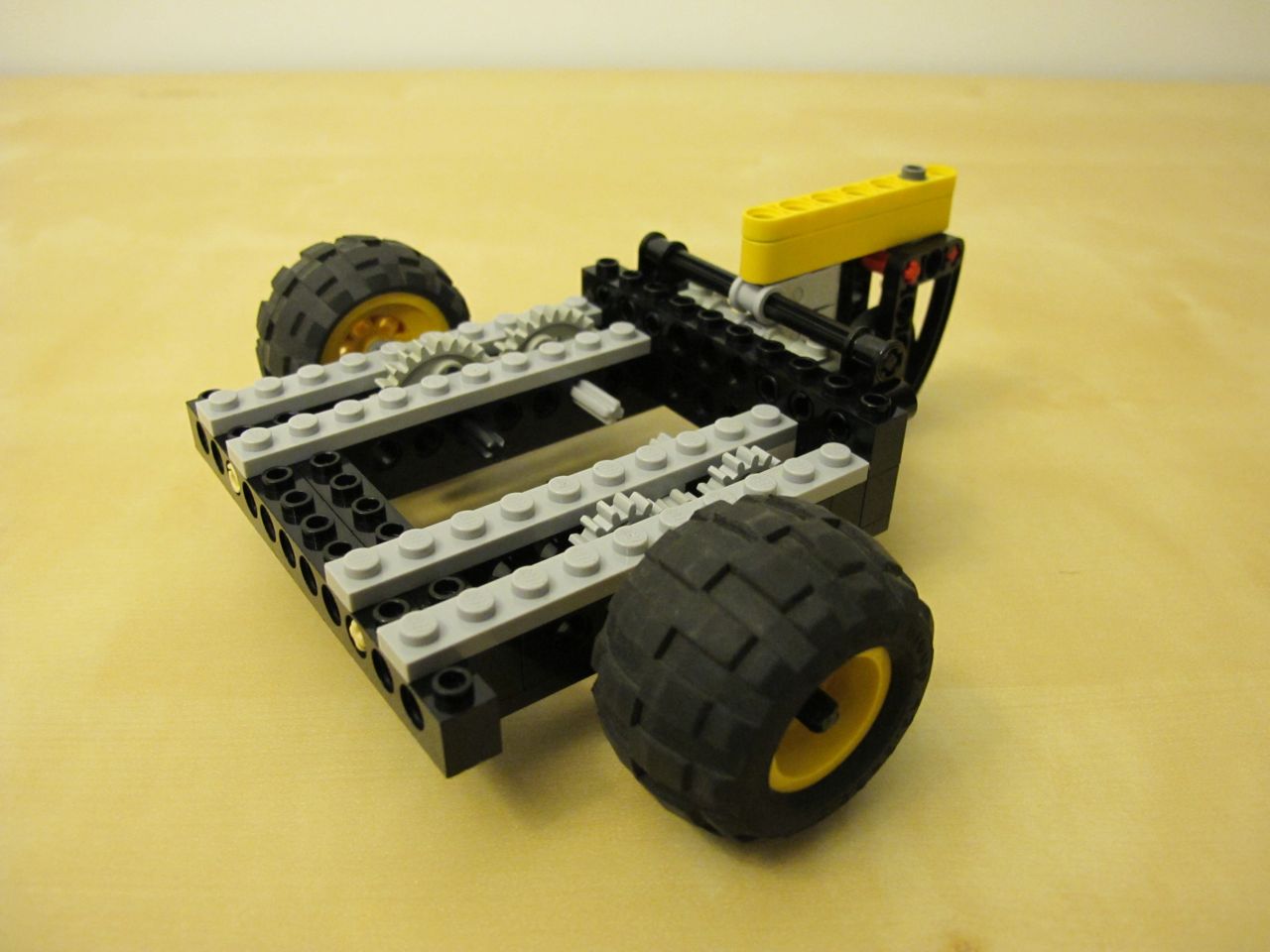
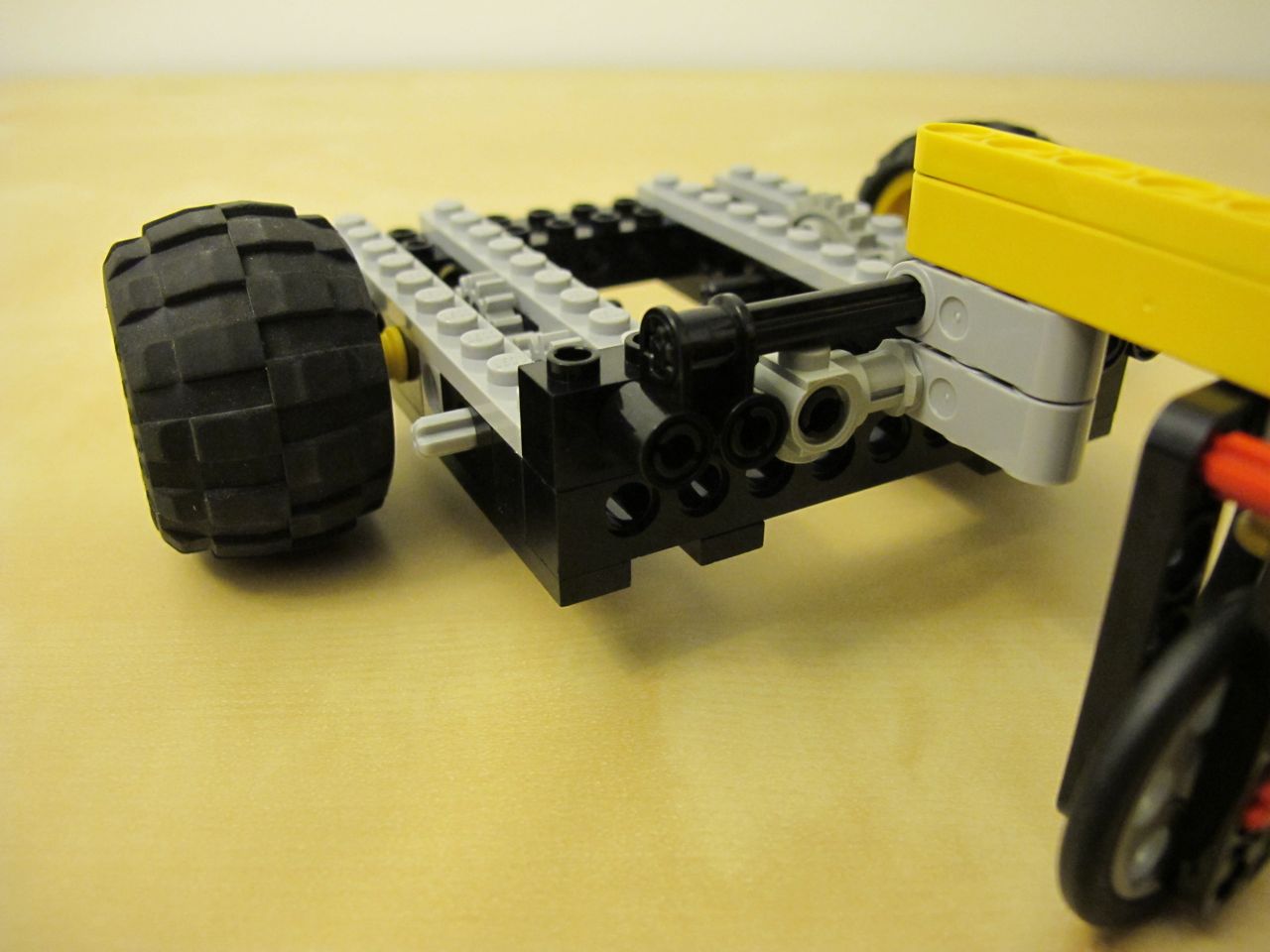
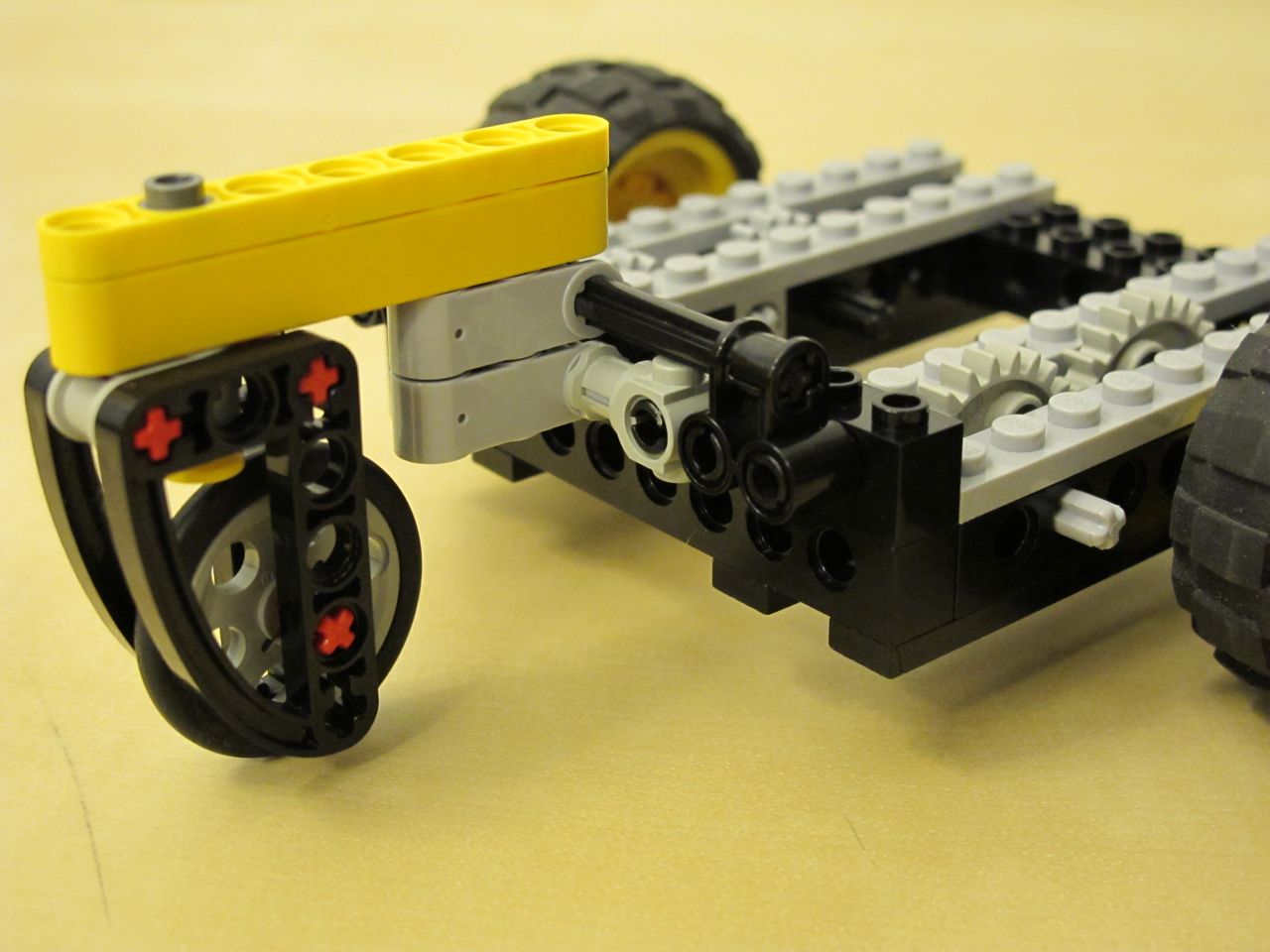
In my first robot iteration, I decided to build a carrier robot that is inspired by the Tomy Omnibot line. Fred is a simple robot that carries a tray and has the ability to move around through a two motor powered dual differential drive system [based on the Hacienda Robotics Program’s compact design found here].
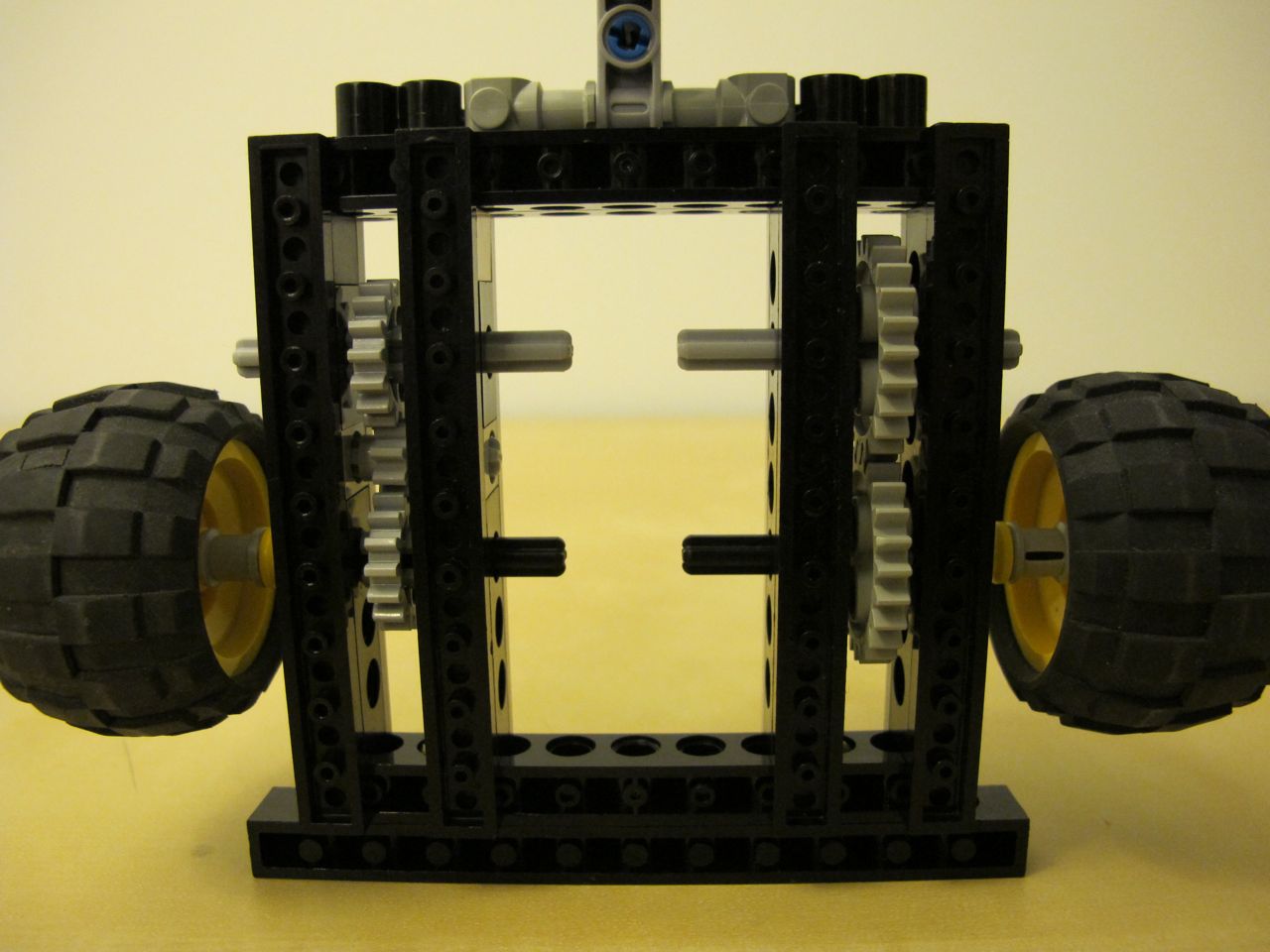
The system will be powered by Lego’s Power Functions. I ordered two small motors, a battery pack, remote control, IR receiver, and lights from Lego. In the photo’s of Fred, you can see that I constructed his body so that the battery pack easily slides into a carrier so that it need not be locked down and it can easily be removed to replace its 6 AA batteries.
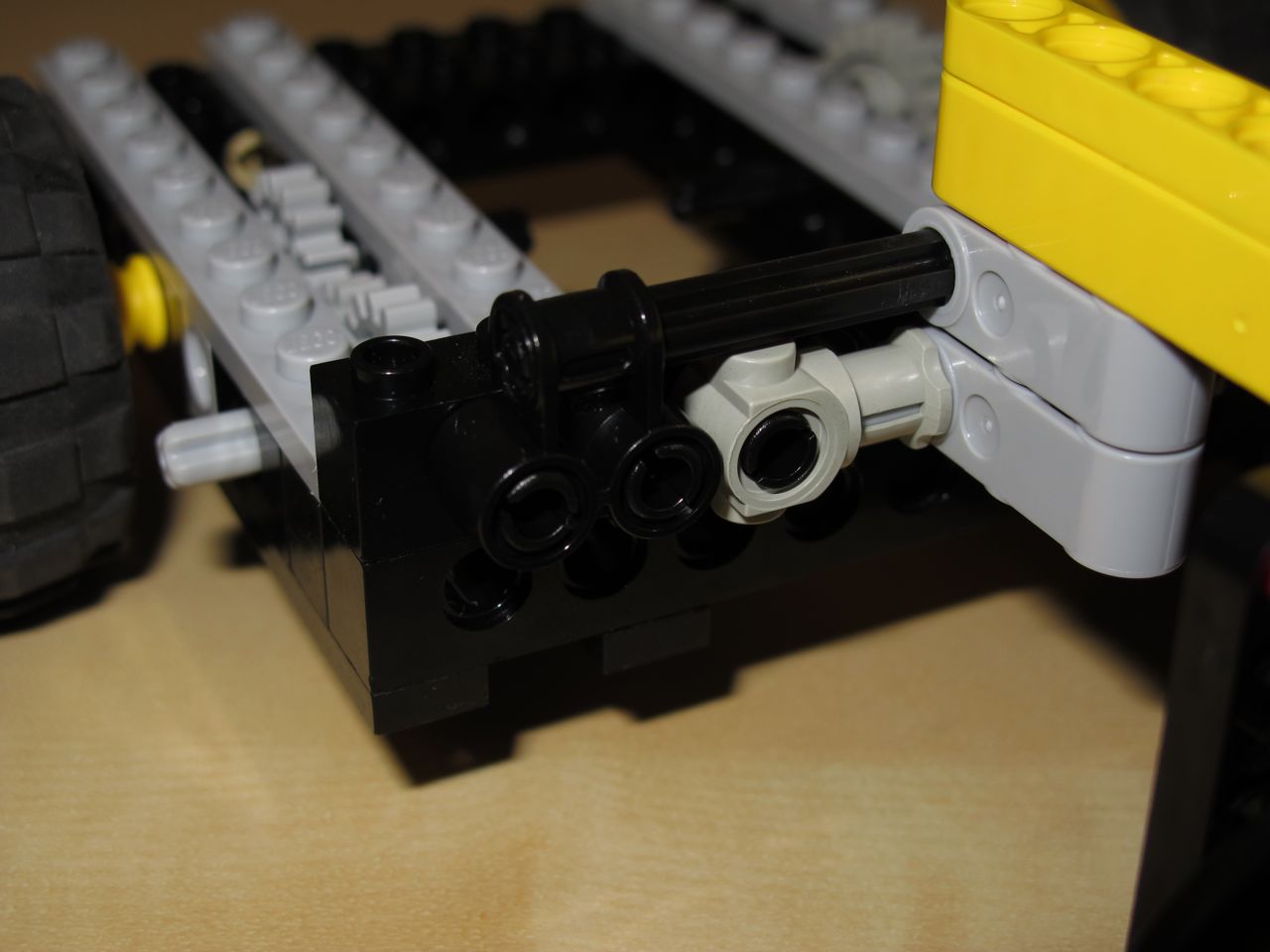
Eventually, Fred’s head will swing back and forth using a piston drive that takes rotational power from the forward drive gears. I have built a prototype of this system pictured below.
As you probably noticed in the pictures above, I don’t have the differential gears in Fred’s drive platform. Unfortunately, my local mail carrier delivered them to the wrong house or they were stolen. USPS Delivery Confirmation shows that the package was delivered somewhere on Friday, June 18 while Y and I were at home, but we never saw the package. Until I know for certain that I won’t receive those gears, I have put further development on hold until after the SFRA conference and a trip to visit my folks in July. Fred is sitting on a bookshelf surrounded by the Power Functions gear.
Eventually, I will take what I learn from building Fred and scale up to a larger robot that will use the NXT 2.0 Intelligent Brick to control itself. I will obtain experience with sensors and programming with the Mindstorms set [more info on this here]. I would like a robot to do more than carry things around the house, such as playing with Miao Miao, so I imagine his exterior design will change as I move forward with the project.
See more pictures of the nearly-completed Fred in the gallery below. Your thoughts, suggestions, and helpful links are welcome in the comments.