My LMC3403, Technical Communication students are well into their second unit project on reader-centered and process-driven fundamentals. In a fun assignment, I wanted the students to try out many different types of technical communication deliverables for different readers/audiences. Also, I wanted them to think differently about nonverbal communication with the heavy emphasis on haptics, physicality, and making.
In this project, their primary task is to build a set of instructions for a Lego model of their own design.
Their Lego model should represent something about their studies, their professional field, or their entrepreneurial spirit.
Their project began with the creation of a proposal memo that laid out their entire project: designing instructions, testing instructions, reporting on tests in a memo, revising instructions, and reflecting on the project in a memo.
Throughout the process, they have to be mindful of different audiences (executives, managers, and customers).
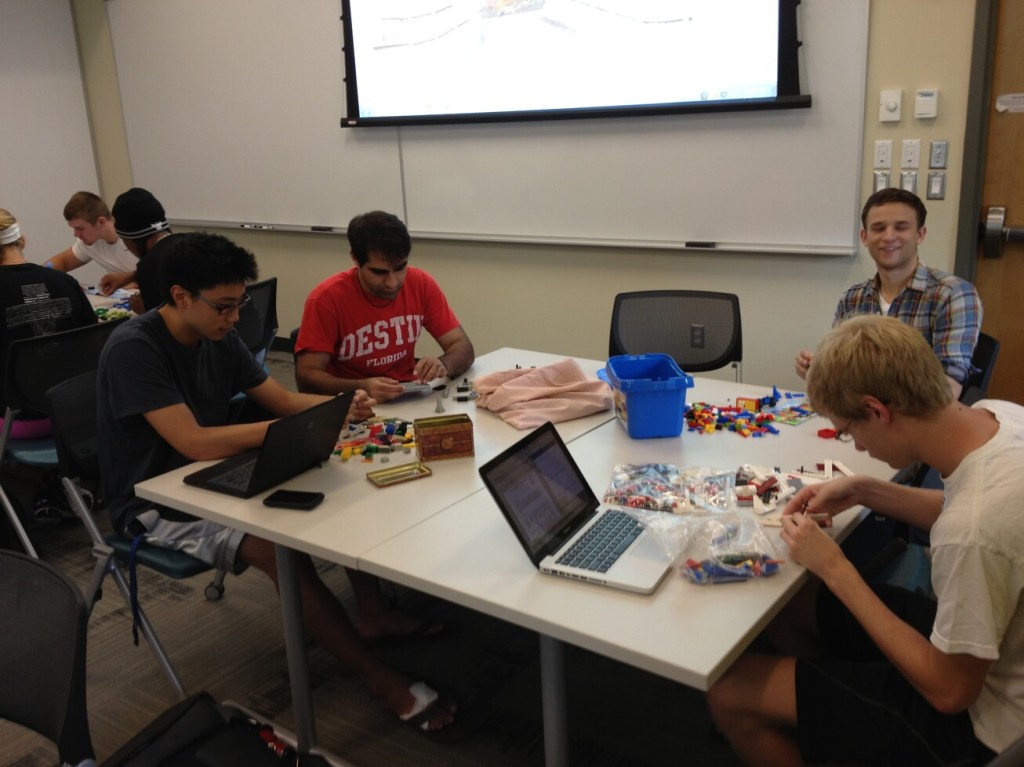
In these photos, the students are busy at work creating the first version of their Lego models.
I was happy to overhear someone say, “It’s nice to actually do something fun in a class for once!”
The excellent group of students (and me in the back right) in my Science Fiction class holding up their SF-inspired Lego creations. Photo by Carol Senf.
Today, unfortunately, was the last day of my Science Fiction class at Georgia Tech.
At the beginning of class, my students completed their third exam. Unlike the previous exams, it only covered the material discussed in class this week: cyberpunk and Taiwanese SF. And unlike the previous 1 hour long exams, it was 30 minutes long.
After the exam, we began what I called an SF debriefing with Lego. I framed this end of semester activity by having them think about WOVEN (written, oral, visual, electronic, and nonverbal) modes of communication. Then, I discussed the importance of one aspect of nonverbal communication: haptics. In the haptic mode, we touch, we build, and we visualize objects. It is an insanely important and often overlooked way in which our brains think, learn, and communicate with others. I told them that this activity was meant to allow them to think about and express some image or object from SF–either discussed in the class or not–that they liked or thought significant. To facilitate their work with haptics, I brought two bins full of Legos–some acquired from the local Lego Store and some from my secret stash. I told them to use up to 40 bricks/elements to build their model. After completing it, they would have a chance to hold it up and tell the class about it, and if they choose to do so, they could take it home as a gift and a memento of the class.
I gave the students about 30 minutes to build, and I encouraged them to get out of their chairs, stand around the bins to dig for bricks, and talk with one another as they worked–talk about what they were building, trade bricks, help one another, etc. It didn’t take much encouragement on my part to get them going–they took off like a fleet of rockets!
When each student had a chance to tell us about their creation, I would offer other connections and background information on their creation to further integrate it into the broader history of SF.
After class, Professor Carol Senf, who was observing my class, was kind enough to take a group photo of the class (see above).
I left my students with the encourage to continue their exploration of SF. I told them that I believe SF to be the most important contemporary literature. It examines the human condition, critiques our social relationships, imagines the effects of science and technology, and energizes our sense of awe and wonder. It can inspire us and it can teach us. Of course, it also can be smashing entertainment.
When class was over, the conversation continued with those students who had other questions about SF (Was PKD really a drug fiend? Who are important/good contemporary SF writers? etc.) and kind words to say about the class.
All that is left for my students is to complete their final papers testing a work of SF against definitions of the genre by others and themselves. I have to grade their third exams and their papers before I can submit grades next week. I am looking forward to reading their papers, but I am sad that this amazing class with these talented students is virtually at an end.
This is the last week of my Science Fiction class. I decided to make some changes to the final week of class to cover the necessary material and to strike out into new territory. Here’s the revised schedule for Monday through Thursday:
Monday: 9:20-10:20 Exam 2. 10:20-11:20 Lecture on Cyberpunk and short discussion of William Gibson’s “Burning Chrome” and Bruce Sterling’s Preface to Mirrorshades anthology.
Tuesday: Begin with episode of the X-Files by William Gibson and Tom Maddox, “Kill Switch.” Followed by discussion and retrocomputing demonstration that looks at the computing origins of cyberpunk. Please bring your laptop today for the in-class activity.
Wednesday: Global Perspectives unit on Taiwanese SF. First part of class: lecture on differences of cultural/historical development and issues of translation. Second part of class: Active learning exercise looking at translations. The two readings for today’s class are on T-Square under Resources.
Thursday: 9:20-9:50 Exam 3. 9:50-11:20 Exploring your SF imagination with Lego. Think about your favorite trope, image, science, or technology from SF and how you might build it with Lego bricks. We will spend time in class building your creation and then sharing your creations with the class as a whole. If you bring your ideas to class, I will bring the bricks (and a camera to record your work)!
Paul Di Filippo, the science fiction author, shares how he built really awesome multi-storied marble mazes with his Legos as a child in his review of The Cult of LEGO on the Barnes and Noble’s website. It is worth the read.
Updated 7/23/2024: Revised language and changed link to one cached on the Internet Wayback Machine.
As you can see in the picture above, I finally received my assortment of gears and rods from ebay seller specialty_bricks. Through no fault of his own, it looked like I wasn’t going to receive my gears at all. The seller shipped the gears in a nice polybag envelope with First Class Parcel and Delivery Confirmation with the USPS. Unfortunately, they were confirmed as delivered last Friday, but apparently at someone else’s house. The person who received my package was kind enough to cut through the poly bag to see what was inside before taping it back up and giving back to the postal carrier for delivery at my house. I wish that I knew the kind soul who thought it was okay to open a package addressed to a different address than his or her own, and I think it’s ironic that Delivery Confirmation, which is meant to ensure delivery at the correct address, actually put me in a worse situation as a claimant for lost mail, because as far as the postal service was concerned when I called the local office was that their computer system showed that it was delivered and the postal carrier claimed to have delivered it at the right house. I have had many adventures with lost, misdelivered, and stolen packages, but I don’t think I have ever been in a catch-22 like this one.
In any event, the gears are now safely here, and the one that I needed the most is this one below–a differential gear. Using two of these, I will be able to use two motors to drive and steer the robot with only two wheels.
I probably won’t have the time to work on Fred again until after SFRA. I will post updates as they are available, and if you live around Kent, you’re welcome to stop by and play with Fred soon.